Research
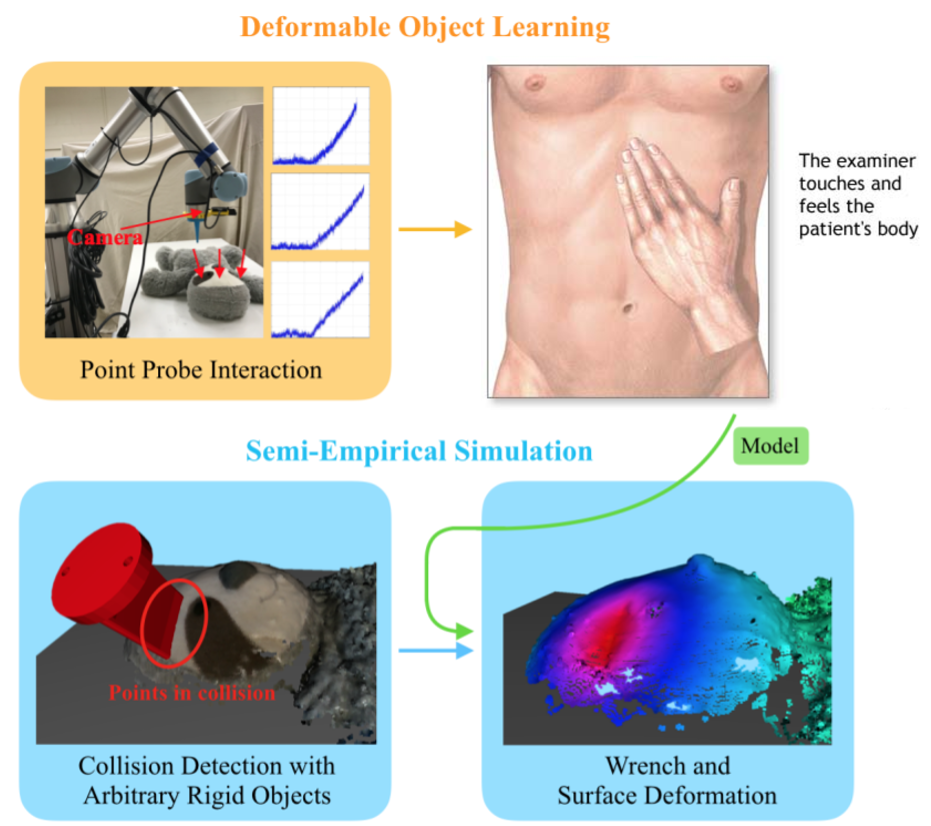
Semi-Empirical Simulation of Learned Force Response Models for Heterogeneous Elastic Objects
Y. Zhu, K. Lu, K. Hauser
Published in The 2020 IEEE International Conference on Robotics and Automation (ICRA 2020)
We presented a semi-empirical method for simulating contact with elastically deformable objects. We proposed a 2-stage framework: firstly a point model was learned via robot poking the object, then a semi-empirical simulator predicted the contact wrench by integrating analytic calculation and the learned point model.
Webpage ·
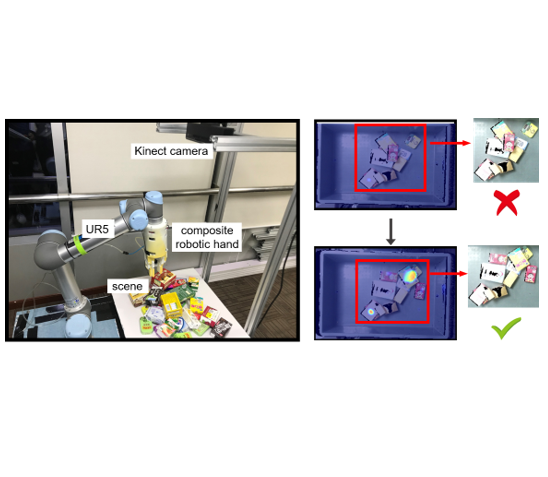
Deep Reinforcement Learning for Robotic Pushing and Picking in Cluttered Environment
Y. Deng*, X. Guo*, Y. Wei*, K. Lu*, B. Fang, D. Guo, H. Liu, F. Sun
* denotes equal contribution
Published in The 2019 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2019)
We design a novel robotic grasping system to automatically pick up objects in a cluttered scene. Resorting to the active exploration, we utilize a deep Q-Network model to help increase lifting success rate for the suction cup.
Webpage ·
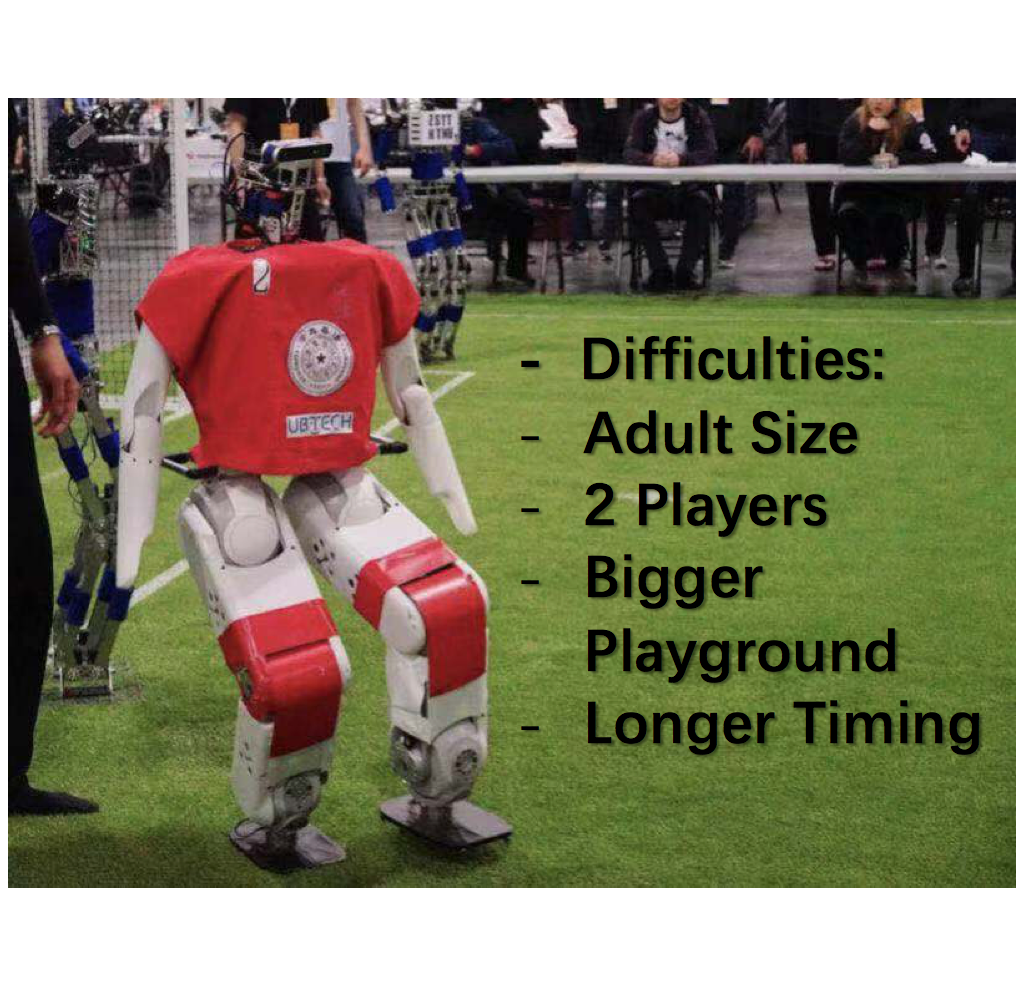
Robocup 2019 Humanoid League Contest
Tsinghua Hephaestus
2nd place in both the Technical Challenge and the Drop-in Contest, 3rd place in 2v2 Soccer Competition
Our team participated in Adult Size Humanoid Contest in RoboCup 2019, at Sydney, Australia. As the main developer in vision-localization group, I applied Yolo V3 in robotic vision,and particle filter algorithm in localization with my teammates.
Webpage ·
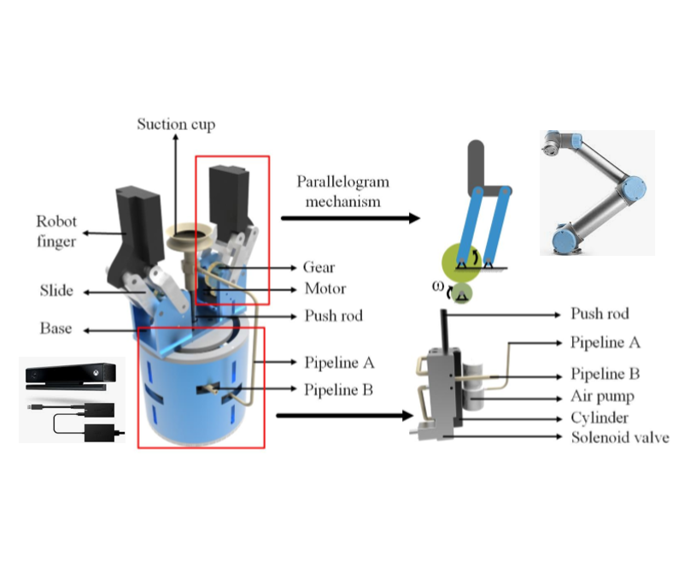
A Composite Robot Manipulator Based on Gripper and Suction Cup
Co-Authors: B. Fang, H. Liu, Y. Deng, X. Guo, K.Lu, Y. Wei
Published, Patent No.CN109465840A
We designed a composite robotic hand which could compound operations. We developed a multi-modal-perception algorithm of vision and tactile and an electronic circuit board independently.

Pocket Instrument
K. Lu, Z. Zeng, Z. Lou, X. Mao, J. Niu, Y. Ren
"The best project of the class"
Realized an multifunctional platform based on the miniaturization of oscilloscope and sensor instrument. The hardware is STM32 microcomputer and an app was developed to Android and IOS.